热点新闻
海洋采矿
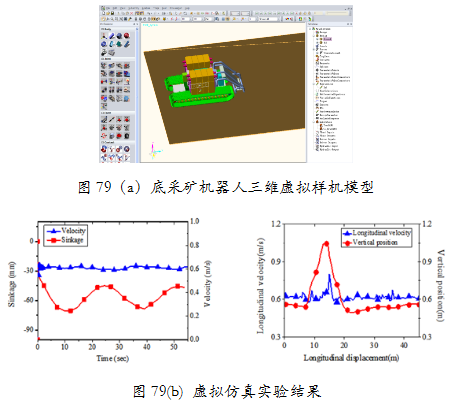
深海底履带式采矿机器人行走性能虚拟仿真实验
发布时间:2015-09-23 作者: 来源: 浏览次数:
实验概况:本虚拟仿真实验采用复杂机械系统三维虚拟样机建模与动力学仿真技术,学生通过对海底履带式采矿机器人机械结构设计、动力学模型建模以及虚拟海底环境场构建,熟悉海底采矿机器人系统的行走及采掘子系统结构组成,进行系统建模组装,并完成在各种作业工况下的行走性能模拟实验分析,为学生掌握深海采矿相关系统知识与工程技术提供直观的帮助和平台。
实验目标:了解深海底采矿作业机器人的机构组成、作业环境载荷以及复杂环境下的作业性能评估;理解复杂机器人系统的工作原理和设计方法,加深对深海作业技术和装备的理解和掌握。
实验功能:通过虚拟样机建模与动力学仿真技术,进行海底采矿机器人的结构设计、动力学建模、虚拟海底环境场构建以及各种作业工况行走性能模拟实验,并支持学生对模型系统的参数化建模与优化设计分析,在软件平台上进行不同结构作业机器人的建模与模拟实验测试,从而加深对深海底采矿机器人的设计方法、作业环境载荷及行走通过性能模拟等的理解和掌握。
教学效果:解深海底采矿作业机器人的机构组成、作业环境及复杂环境下的作业性能评估;理解复杂机器人系统的工作原理和设计方法,加深对深海作业技术和装备的理解和掌握