热点新闻
仿生机械手
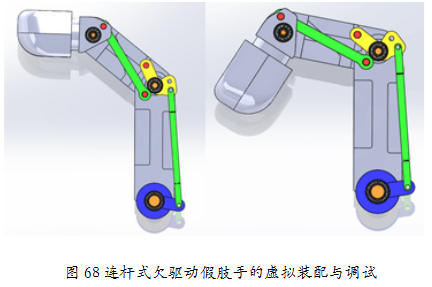
连杆式欠驱动假肢手的虚拟装配与调试
发布时间:2015-09-22 作者: 来源: 浏览次数:
实验概况: 连杆机构的应用十分广泛,机械手的传动系统常常采用连杆机构,连杆机构设计的基本问题都是根据给定的要求选定机构的形式,确定个构件的尺寸,同时还需要满足连续运动的要求和动力条件。本虚拟实验采用SolidWorks软件,让学生根据不同连杆传动形式与方案,在计算机上虚拟实现连杆型欠驱动的设计与装配,为学生掌握平面四连杆的分类与应用,多连杆机构的集成设计与分析提供帮助与直观认识。同时在SolidWorks实验平台实现手指运动的优化并与连杆型欠驱动假肢手的运动进行对比分析。
实验目标:巩固和加强机械原理和机械设计课程的理论知识;使学生掌握连杆机构的设计与运动分析方法等。
实验功能:通过对不同类型的连杆机构的装配与运动关系分析,使学生掌握平面连杆机构及其设计的机械原理。
教学效果:巩固和加强机械原理和机械设计课程的理论知识;使学生掌握连杆机构的设计与运动分析方法等。