
热点新闻
智能制造
机器人轨迹规划虚拟仿真实验
发布时间:2015-08-18 作者: 来源: 浏览次数:
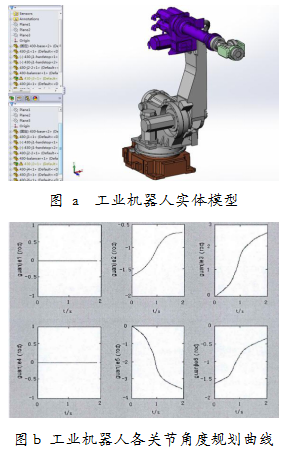
实验概况:机器人的轨迹规划是指在满足运动过程中系统所需要满足的约束条件下,对机器人末端点所走路径进行规划使其运行更加平稳可靠。机器人轨迹规划是其运动路径合理性的重要保障,是提高其运动效率以及精度的重要方法之一。轨迹规划的任务是依据工作任务要求,推演出预期的机器人运动轨迹,即对机器人的运动路径和轨迹实现描述,计算出机器人末端执行器的关节变量随时间的变化量。采用传统的工业机器人设计方法对机器人进行的设计,由于不能对设计进行迅速有效的实验验证,造成了资源以及人力的浪费,使用虚拟仿真技术可以节约成本,缩短机器人试验研发周期等给研宄工作带来诸多益处。
实验目标:通过RobotArt软件,在软件中建立起工业机器人及其工作的三维环境,通过零件模型几何特征或自绘空间曲线创建工业机器人运动轨迹;通过相应的高精度空间解算算法反求出工业机器人各轴运动参数,并结合三维模型实现工业机器人实际运动仿真,实现碰撞检查。完成轨迹设计、规划和优化。
实验功能:本实验依托运动轨迹生成和优化技术等核心技术,具备在计算机上完成轨迹设计、规划、运动仿真、碰撞检查、姿态优化等功能。
教学效果:让学生掌握机器人编程、了解运动轨迹规划及设计、并初步具备对机器人运动轨迹进行优化的能力。
下一篇:机器人编程虚拟仿真实验